
ロボットを動かすにはセンサ入力、マイコン制御、モータ出力、外からのコントロールが必要であれば無線モジュールが必要です。
違うロボットを制作するごとに改めて基板を制作して、ソフト組み込むのは時間がかかります。
マイコンボード、モータードライブ基板など、別々に基板を用意して
基板化、製品化する前に仮組みをして検証を行います。
機械・電子回路・ソフトウエア単体での開発業務も行いますが、それらを組み合わせた汎用性の高いモジュールを持っています。
モジュールを組み合わせて、ロボットの試作を行います。選んだ部品の選定の検証と動作の検証が確認できましたら、試作に入ります。
不格好でもモジュールの組み合わせで要求仕様の検証と回路基板の製造中にソフトウエアのプログラミングを並行で行います。
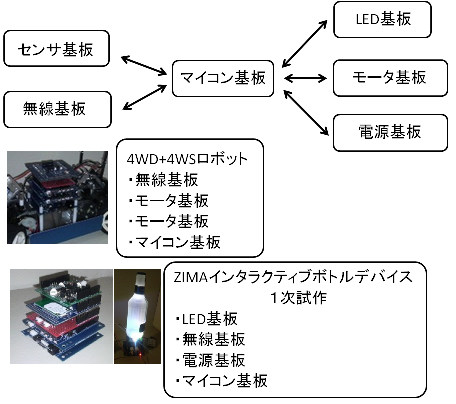
(例:GUGEN2014コンテスト)

(下から マイコン基板、モータドライブ基板、電池・昇圧回路基板、無線モジュール基板)
目的、仕様決め、試作から検証までの時間短縮を狙います。

マイコン基板

モータドライブ基板

カスタマイズは手配線で行います
Bluetooth無線モジュールは購入して

組み立てて移動ロボットの制御基板になります。
マイコン基板、電池・昇圧回路基板、センサ・LED基板で検証を行いました。
(LEDの色の指定やパターンはありません。加速度センサからの入力に対し、LEDの色分けが出来るかの検証です。)
検証がすみましたら、制作に入りますので試作の時間と費用を抑えることが出来ます。
